Magothy Autopilot
The Magothy Autopilot is the culmination of 20 years of military unmanned marine autopilot design experience across USV, UUV, ROV, towed, and Hybrid marine systems. It combines innovative and proven techniques designed specifically for unmanned marine vehicles. Below are the features that make the Magothy Autopilot superior to other autopilots.
Steadiness measurements for an 8” diameter UUV

These steadiness values were achieved on an 8″ diameter UUV with a single aft propeller and X-tail fin configuration. The hardware and software of the vehicle were designed by Magothy personnel, and the autopilot was a less sophisticated precursor to the current Magothy Autopilot. Note that steadiness and overall vehicle performance is a function of more than just the autopilot. It is a combination of many aspects of the system such as quality of the sensors and actuators, the latency throughout the system, and the design of the control surfaces. The Magothy Autopilot will maximize the performance of your system.
Steadiness
The Magothy Autopilot excels in vehicle steadiness for applications such as sonar surveys or dynamic positioning. Utilizing techniques such as gain scheduling across the entire speed range, online controller discretization, cascading controller design, professional gain tuning, integration anti-windup, online current estimation, and path-planning the Magothy Autopilot is able to achieve the level of steadiness necessary for the most demanding payloads.
Track Following
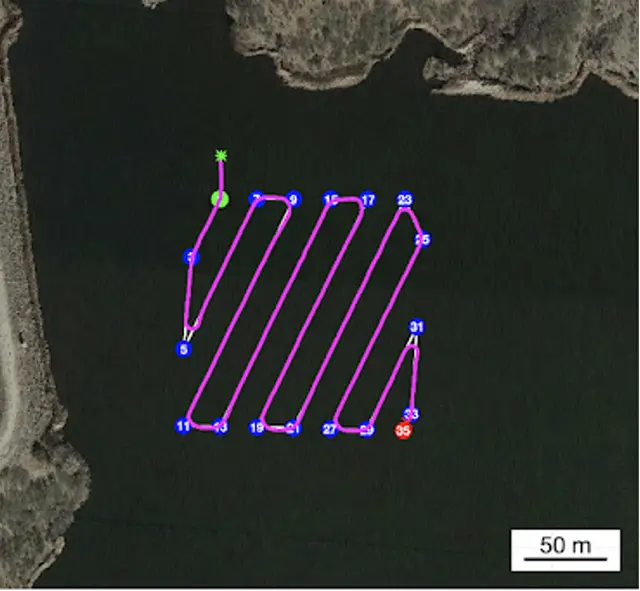
The ability of the autopilot to closely follow tracks is important not only for sonar / payload performance but also for traversing around obstacles and providing predictable behavior. The Magothy Autopilot has been demonstrated to provide single digit centimeter off-track error in the presence of significant wind and currents as shown in Figure 1.
Figure 1: Magothy Autopilot performance on a small USV. This mission is a survey pattern at 4 knots commanded speed. There were 25mph sustained winds and gusts to 35mph with a 1 knot current.

Reliability
Reliability of any system is a process and Magothy River Technologies employs a rigorous software process to ensure that the Magothy Autopilot runs properly every time it is turned on. This process begins with design discussions on how a problem or feature should be addressed. Once a plan has been formulated, the changes are made and tested in a software in the loop (SITL) simulation. If the results are satisfactory, the code goes through code review where every line of code is reviewed by one or more engineers to look for issues.
Processor in the loop (PITL) and hardware in the loop (HITL) testing follows. Finally, the code is tested in-water and then released to customers.The work does not stop there, however. The Magothy Autopilot is in use on multiple vehicles including a Navy owned USV currently being tested in the Pacific ocean. Magothy employees regularly analyze in-water data from customer operations to look for problems and ensure optimal performance.
Professional Gain Tuning
Features and controller design alone are worthless unless the autopilot is competently tuned. The Magothy Autopilot is tuned on every vehicle by professional control engineers. The tuning process is far beyond “turning knobs” until the vehicle looks good. Our engineers run the vehicle through a large series of maneuvers to characterize the dynamic behavior of the vehicle across its entire speed range. These data are then analyzed using Mathworks MATLAB and Simulink.
Gains are computed for the desired performance characteristics of the vehicle such as response time or steadiness. The gains are then tested in simulation and in-water with fine tuning adjustments made when necessary. This process ensures the vehicle will perform optimally and predictably across its entire speed range in all environments.
Path Planning
The Magothy Professional UUV Autopilot performs path planning in real-time on the vehicle to avoid obstacles and stay within designated areas. Our autopilot systems have alternate PNT (positioning navigation & timing) and sensors to detect contested navigation. These provides two main benefits. One, it allows the vehicle to be confidently operated in areas with hazards to vehicle safety. Two, it reduces operator burden when planning and executing missions.
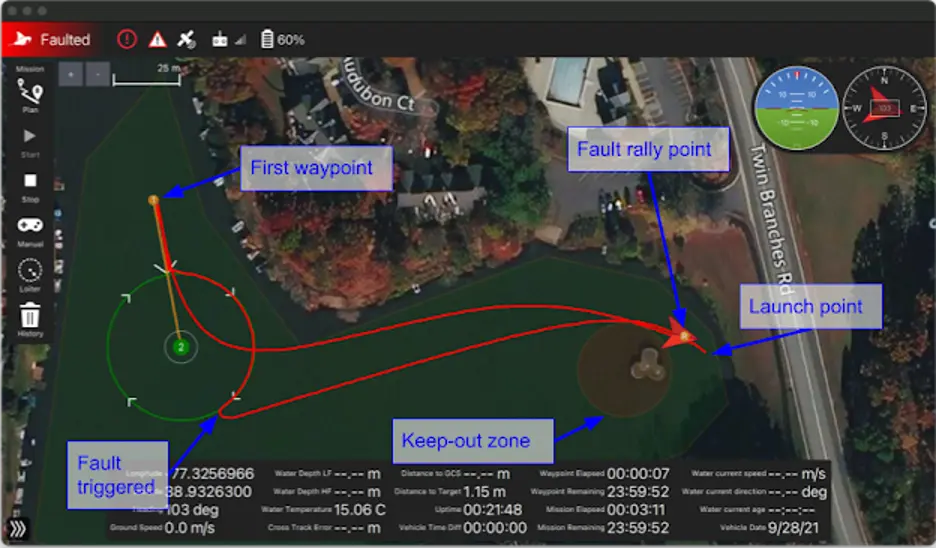
The mission plan contains a single waypoint followed by an orbiting loiter about point two. The green polygon represents a keep-in zone, and the red circle represents a keep-out zone. The vehicle is launched behind the keep-out zone on the right of the picture. The user does not need to define a route from the launch point to the first waypoint.
The Magothy Autopilot determines the appropriate route to go around the keep-out zone and stay within the keep-in zone. An artificial fault is triggered at the bottom left of the picture. The vehicle's fault response is configured to go to the rally point, shown near the launch point, when a fault occurs. Again, the Magothy Autopilot computes a safe path around the keep-out zone to return to the rally point.
Collaborative Marine Autonomy
The Magothy Autopilot has robust features for safe operation of the vehicle including path planning as well as detecting complex faults with several user configurable fault responses.
Magothy facilitates sophisticated third-party autonomy by providing a well-documented interface control document (ICD) and a simulator that can be used by the customer to implement their desired autonomy. Furthermore, the Magothy Autopilot is integrated with SeeByte Neptune, a goal based, collaborative autonomy, simulator, and UX experience.
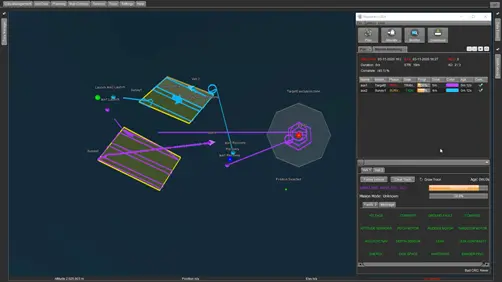
SeeByte Neptune Operator Interface
.webp)
Development Kit
The Magothy Software Development Kit (SDK) allows customers to develop and maintain their own device code to interact with their vehicles hardware. The Magothy SDK provides a rich set of interfaces and utilities written in C++.
Pellentesque rutrum dolor sed
Morbi dapibus elementum aliquam. Vivamus sodales eros mauris, in feugiat erat bibendum quis. Integer tristique nibh ut aliquam pharetra. Duis ut est quam. Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Donec non justo nunc. Donec auctor consequat congue.

Interdum et malesuada
fames ac ante ipsum primis in faucibus. Praesent elementum lacinia ex. Mauris blandit, ante in gravida porttitor, est ex porta dolor, nec tristique nulla elit at diam. Vestibulum pellentesque velit a diam interdum dictum. Cras id iaculis felis, a rutrum augue. Quisque convallis elementum.
Sed at posuere ligula. Phasellus dapibus tortor.
Aliquam eget leo gravida, malesuada arcu non, accumsan ex. Nulla mattis leo vel turpis vulputate, lobortis fermentum felis lacinia. Aenean a magna mi. Cras ultricies pellentesque dui nec congue. Phasellus nec lectus ut lorem posuere vulputate ut quis felis. Donec elit lectus, mattis vel dapibus vel, mattis nec diam.

Download Our Brochure
